Chapter 3 Motion In A Plane Important Points
Vector: A physical quantity which has both magnitude and direction is called a vector.
Vector Example: Displacement, Velocity, Force, etc.
Scalar: A physical quantity which has only magnitude is called a scalar.
Scalar Example: Distance, Speed, Work, etc.
Equality Of Vectors: If two vectors are equal both in magnitude and direction are called equal vectors.
Resultant Vector: If the effect of many vectors is represented by a single vector, then that single vector is called the resultant vector.
Read And Learn More Class 11 Physics Notes
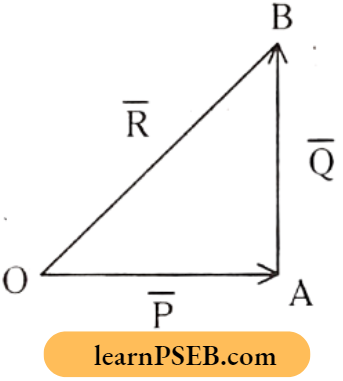
Triangle Law: If the magnitude and direction of two vectors are represented by two sides of a triangle taken in order, then the third side of the triangle taken in reverse order will give the resultant both in magnitude and direction.
PSEB Class 11 Physics Notes Chapter 3 Motion In A Plane
From the above figure,
⇒ \(\overline{\mathrm{R}}=\overline{\mathrm{P}}+\overline{\mathrm{Q}}\) represents vectorial addition of \(\overline{\mathrm{P}}\) and \(\overline{\mathrm{Q}}\).
Parallelogram Law: If two vectors are represented by the two adjacent sides of a parallelogram, then the diagonal passing through the intersection of those two vectors will represent the resultant both in direction and magnitude.
The other diagonal will represent the difference or subtraction of the vectors \(\bar{R}_1=\overline{\mathrm{P}}-\bar{Q}\)
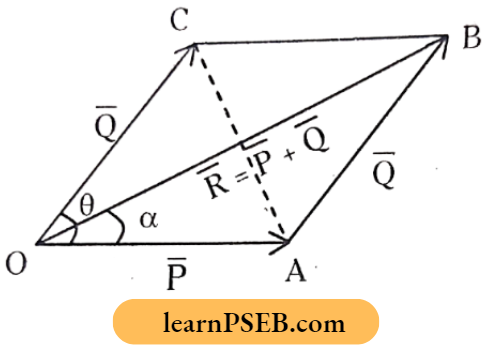
In the above figure, diagonal OB is the sum of vectors i.e. \(\overline{\mathrm{R}}=\overline{\mathrm{A}}+\overline{\mathrm{B}}\), diagonal AC is | subtraction of vectors i.e. \(\overline{\mathrm{R}}=\overline{\mathrm{A}}-\overline{\mathrm{B}}\)
Laws Of Vector Addition:
- Vector addition is commutative i.e., \(\overline{\mathrm{A}}+\overline{\mathrm{B}}=\overline{\mathrm{B}}+\overline{\mathrm{A}}\)
- Vector addition obeys associative law i.e., \((\overline{\mathrm{A}}+\overline{\mathrm{B}})+\overline{\mathrm{C}}=\overline{\mathrm{A}}+(\overline{\mathrm{B}}+\overline{\mathrm{C}})\)
Unit Vector: If the magnitude of any vector is unity, then it is called a unit vector.
Unit Vector Example: unit vector \(\bar{A}=\frac{\bar{A}}{|\bar{A}|}=1\)
Unit vectors along X and Y directions are represented by \(\bar{i}\) and \(\bar{j}\). In space unit, I vectors along X, Y and Z directions are represented by \(\bar{i}\), \(\bar{j}\) and \(\bar{k}\).
Null Vector: If the magnitude of a vector is zero, then it is called a null vector.
Class 11 Physics Motion In A Plane Notes PSEB
The null vector has only direction.
Null Vector Example: \(\bar{A}\) – \(\bar{A}\) = 0 It has only direction, magnitude is zero.
∴ \(\bar{A}\) x \(\bar{0}\) = \(\bar{0}\) It has only direction, magnitude is zero.
Position Vector: Any vector in a plane can be represented as \(\overline{\mathrm{A}}=A_x \overline{\mathrm{i}}+\mathrm{A}_y \overline{\mathrm{j}}\)
Any vector in space can be represented as \(\bar{A}=A_x \bar{i}+A_y \bar{j}+A_z \bar{k}\)
Where Ax, Ay and Az are magnitudes along X, Y and Z directions.
Resolution Of Vectors: Every vector can be resolved into two mutually perpendicular components. This division is with fundamental principles of trigonometry.
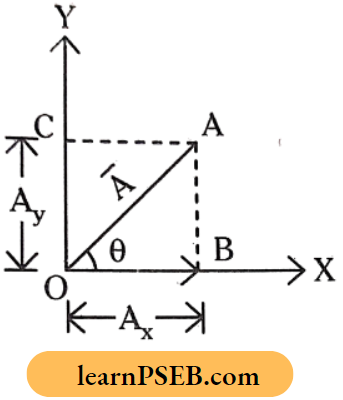
∴ \(\bar{A}=\vec{A}_x+\bar{A}_y\)
∴ \(\bar{A}=\vec{A}_x \hat{i}+\bar{A}_y \hat{j}\)
Resolution Of Vectors Example: Let A make an angle ‘η’ with the X-axis then
X- component of \(\overline{\mathrm{A}}_{\mathrm{x}}=\overline{\mathrm{OB}}=\overline{\mathrm{A}} \cos \theta\)
Y – component of \(\overline{\mathrm{A}}_{\mathrm{y}}=\overline{\mathrm{OC}}=\overline{\mathrm{A}} \sin \theta\)
Note: If values of Ax and Ay are given then
Resultant \(\bar{A}=\sqrt{A_X^2+A_Y^2}\)
Angle made by vector \(\overrightarrow{\mathrm{A}}\) with X-axis
∴ \(\theta=\tan ^{-1}\left[\frac{\mathrm{A}_Y}{\mathrm{~A}_{\mathrm{X}}}\right]\)
PSEB Class 11 Physics Chapter 3 Notes
Projectile: When a body is thrown into space with some angle θ (θ ≠ 90°) to the horizontal it moves under the influence of gravity then it is known as projectile.
Note: The path of a projectile can be represented by the equation y = ax – bx². It represents a parabola.
Time taken to reach maximum height \(\mathrm{t}=\frac{\mathrm{v}_0 \sin \theta}{\mathrm{g}}\)
Maximum height reached \(h_{\max }=\frac{v_0^2 \sin ^2 \theta}{2 g}\)
Time Of Flight(T): The time interval from the instant of projection to the instant where it crosses the same plane or touches the ground is defined as time of flight.
Time of flight \(\mathrm{T}=\frac{\mathrm{v}_0 \sin \theta}{\mathrm{g}}\)
Note: For horizontally projected projectiles \(\mathrm{T}=\frac{\mathrm{v}_0 \sin \theta}{\mathrm{g}}\)
Range (Or) Horizontal Range (R): It is the horizontal distance from the point of projection to the point where it touches the ground.
Range \(\mathrm{R}=\frac{2 \mathrm{v}_0^2 \text{Sin} 2 \theta}{\mathrm{g}} \text {; }\)
For horizontal projection \(R=v_0 \sqrt{2 h / g}\)
Uniform Circular Motion: If a body moves with a constant speed on the periphery of a circle, then it is called uniform circular motion.
Time Period: In circular motion time taken to complete one rotation is defined as time period (T).
Time period (T) = 2π/ω
Note: Frequency v = \(\frac{1}{T}\) is equal to number of rotations completed in one second. The relation between ω and ν is ω = 2πν or v = 2πυR.
Relative Velocity In Two-Dimensional Motion: Let two bodies A and B are moving with velocities \(\overrightarrow{\mathrm{V}}_{\mathrm{A}}\) and \(\overrightarrow{\mathrm{V}}_{\mathrm{B}}\) then the relative velocity of A with respect to B is \(\vec{V}_{A B}=\vec{V}_A-\vec{V}_B\)
Relative velocity of B with respect to A is \(\vec{V}_{B A}=\vec{V}_B-\vec{V}_A\)
Chapter 3 Motion In A Plane Important Formulae
For (like) parallel vectors say \(\overline{\mathrm{P}}\) and \(\overline{\mathrm{Q}}\) resultant \(\overline{\mathrm{R}}\) = \(\overline{\mathrm{P}}\) + \(\overline{\mathrm{Q}}\).
For antiparallel vectors say \(\overline{\mathrm{P}}\) and \(\overline{\mathrm{Q}}\) resultan \(\overline{\mathrm{R}}\) = \(\overline{\mathrm{P}}\) – \(\overline{\mathrm{Q}}\)
Rectangular components of a vector \(\overline{\mathrm{R}}\) are Rx = R cos θ and Ry = R sinθ
The resultant of vectors Is given by parallelogram law.
- Resultant, \((R)=\sqrt{P^2+Q^2+2 P Q \cos \theta}\)
- Angle made by Resultant \(\alpha=\tan ^{-1}\left[\frac{Q \sin \theta}{P+Q \cos \theta}\right]\)
- Difference of vectors = \(\sqrt{\mathrm{P}^2+\mathrm{Q}^2-2 \mathrm{PQ} \cos \theta}\) where θ is the angle between \(\bar{P}\) and \(\bar{Q}\).
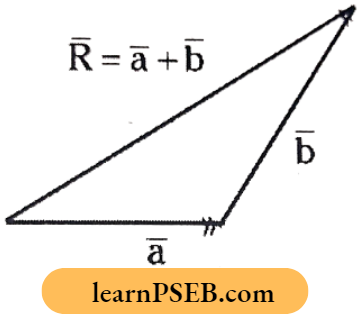
If two vectors \(\bar{a}\) and \(\bar{b}\) are an ordered pair, then from triangle law, the resultant \(\bar{R}\) = \(\bar{a}\) + \(\bar{b}\)
- When two bodies A and B are travelling in the same direction ⇒ relative velocity, VR = VA – VB.
- Two bodies travelling in opposite directions ⇒ relative velocity, VR = VA + VB
- Punjab State Board Class 11 Physics Notes Chapter 3
Crossing Of A River In Shortest Path:
- To cross the river in the shortest path, it must the rowed with an angle, θ = sin-1 (VWE/VBW) perpendicular to the flow of water.
- The velocity of the boat with respect to the earth. \(V_{R E}=\sqrt{V_{P W}^2-V_{W E}^2}\)
- Time taken to cross, \(\mathrm{t}=\frac{\text { width of river }(l)}{\text { velocity of boat w.r.t earth }}=\frac{l}{V_{E E}}\)
Crossing The River In the Shortest Time:
- Time taken to cross the river, \(\mathrm{t}=\frac{\text { width of river t }}{\text { velocity of boat w.r.t water } \mathrm{V}_{B W}}\)
- Resultant velocity of boat, \(V_R=\sqrt{V_{E W}^2+V_{W E}^2}\)
- The angle of resultant motion with θ = tan-1 (VWE/VBW) down the stream
Dot Product: \(\bar{A} \cdot \bar{B}=|\bar{A}| \cdot|\bar{B}| \cos \theta\)
Let \(\bar{A}=x_1 \bar{i}+y_1 \bar{j}+z_1 \bar{k}\) and \(\overline{\mathrm{B}}=\mathrm{x}_2 \overline{\mathrm{i}}+\mathrm{y}_2 \overline{\mathrm{j}}+\mathrm{z}_2 \overline{\mathrm{k}}\) then
- \(\bar{A}+\bar{B}=\left(x_1+x_2\right) \bar{i}+(y_1+ y_2)\bar{j}\) \(+\left(z_1+z_2\right) \bar{k}\)
- \(|\bar{A}|=\sqrt{x_1^2+y_1^2+z_1^2}\); \(|\bar{B}|=\sqrt{x_2^2+y_2^2+z_2^2}\).
- \(\bar{A} \cdot \bar{B}=x_1 x_2+y_1 y_2+z_1 z_2\)
In dot product \(\overline{\mathrm{i}} \cdot \overline{\mathrm{i}}=\overline{\mathrm{j}} \cdot \overline{\mathrm{j}}=\overline{\mathrm{k}} \cdot \overline{\mathrm{k}}=1\) i.e., dot product of heterogeneous vectors is unity.
In dot product \(\bar{i} \cdot \bar{j}=\bar{j} \cdot k=\bar{k} \cdot \bar{i}=0\)
In dot product \(\overline{\mathrm{i}} \cdot \overline{\mathrm{j}}=\overline{\mathrm{j}} \cdot \mathrm{k}=\overline{\mathrm{k}} \cdot \overline{\mathrm{i}}=0\) i.e., dot product of heterogeneous vectors is unity.
In dot product \(\overline{\mathrm{i}} \cdot \overline{\mathrm{j}}=\overline{\mathrm{j}} \cdot \mathrm{k}=\overline{\mathrm{k}} \cdot \overline{\mathrm{i}}=0\)
Projectiles Thrown Into The Space With Some Angle ’θ’ To The Horizontal: Horizontal component (ux) = u cos θ. Which does not change.
Vertical component, uy = u sin θ (This component changes with time)
Time of flight, (T) = \(\frac{2 u \sin \theta}{g}\),
H = \(\frac{u^2 \sin ^2 \theta}{2 g}, \text { Range }(R)=\frac{u^2 \sin 2 \theta}{g}\)
Velocity of projectile, \(v=\sqrt{v_x^2+v_y^2}\) where vx = uy = u cos θ and vy = u sin θ – gt
Angle of resultant velocity with horizontal, \(\alpha=\tan ^{-1}\left[\frac{v_y}{v_x}\right]\) where \(v_y=u \sin \theta-g t\) and \(\mathrm{v}_{\mathrm{x}}=\mathrm{u} \cos \theta\)
In the projectile range, R is the same for complementary angles (θ and 90- θ).
For θ = 45°, Range is maximum
⇒ \(R_{\max }=\frac{u^2}{g}\) corresponding to \(h_{\max }=\frac{u^2}{4 g}\)
Relation between \(R_{\max }\) and \(h_{\max }\) is \(R_{\max }\) = 4 \(h_{\max }\)
For complimentary angles of projection, \(\mathbf{h}_1+\mathbf{h}_2=\frac{\mathbf{u}^2}{2 \mathrm{~g}}\);
Punjab State Board Class 11 Physics Notes Chapter 3
Range, \(\mathrm{R}=4 \sqrt{\mathbf{h}_1 \mathbf{h}_2} ; \mathrm{R}_{\max }=2\left(\mathrm{~h}_1+\mathrm{h}_2\right)\)
Horizontally Projected Projectiles: Time of flight, \(t=\sqrt{\frac{2 h}{g}}\)
Range, R = u x t = u \(\sqrt{\frac{2 h}{g}}\)
Velocity of projectile after a time t is, \(\mathrm{v}=\sqrt{\mathrm{v}_{\mathrm{x}}^2+\mathrm{v}_{\mathrm{y}}^2}\) where \(\mathrm{v}_{\mathrm{x}}=\mathrm{u}_{\mathrm{x}}=\mathrm{u}\) and \(\mathrm{v}_{\mathrm{y}}=\mathrm{gt}\)
∴ \(\mathrm{v}=\sqrt{\mathrm{u}^2+\mathrm{g}^2 \mathrm{t}^2}\)
The angle of resultant with X – axis, \(\alpha=\tan ^{-1}\left[\frac{v_y}{v_x}\right]\) where \(v_x=u\) and \(v_y=g t\)
∴ \(\alpha=\tan ^{-1}\left[\frac{g t}{u}\right]\)